

 联系我们
联系我们

1、将机器人所有轴运行到“预校正”位置
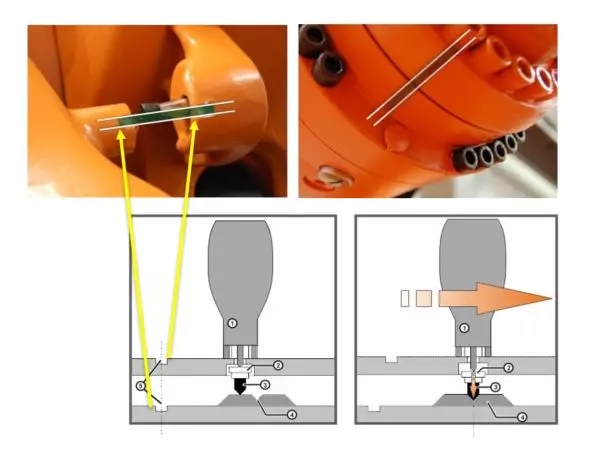
名词解释:预校正位
“预校正位”参考标识通常是凹槽或凹坑,且都涂有白色油漆。操作机器人,将标识对齐,即为预校正位置。2、 将 EMD 依次安装到相应轴的零点探头上
(注意:当 EMD 安装入探头后,不能手动操作移动该轴。否则将损坏探头。)

3、进入菜单“执行零点校正 ”。

4、 选择需要校零的轴,点击“校正”键。

6、 再按住启动键并保持,机器人轴将慢速移动寻找零点标记槽。
7、完成后机器人将自动停机,届时再松开使能键以及启动键。
依次重复步骤2-7,完成每一个轴的零点校正。
以上是标准式(即单一负载规格)的 EMD 校正零点的方法。
对于单一负载(标准)我们建议首次校正时带着负载校正,以后每次校正都带着相同的负载。
来源:网络
更多资讯:库卡机器人