联系我们
联系我们

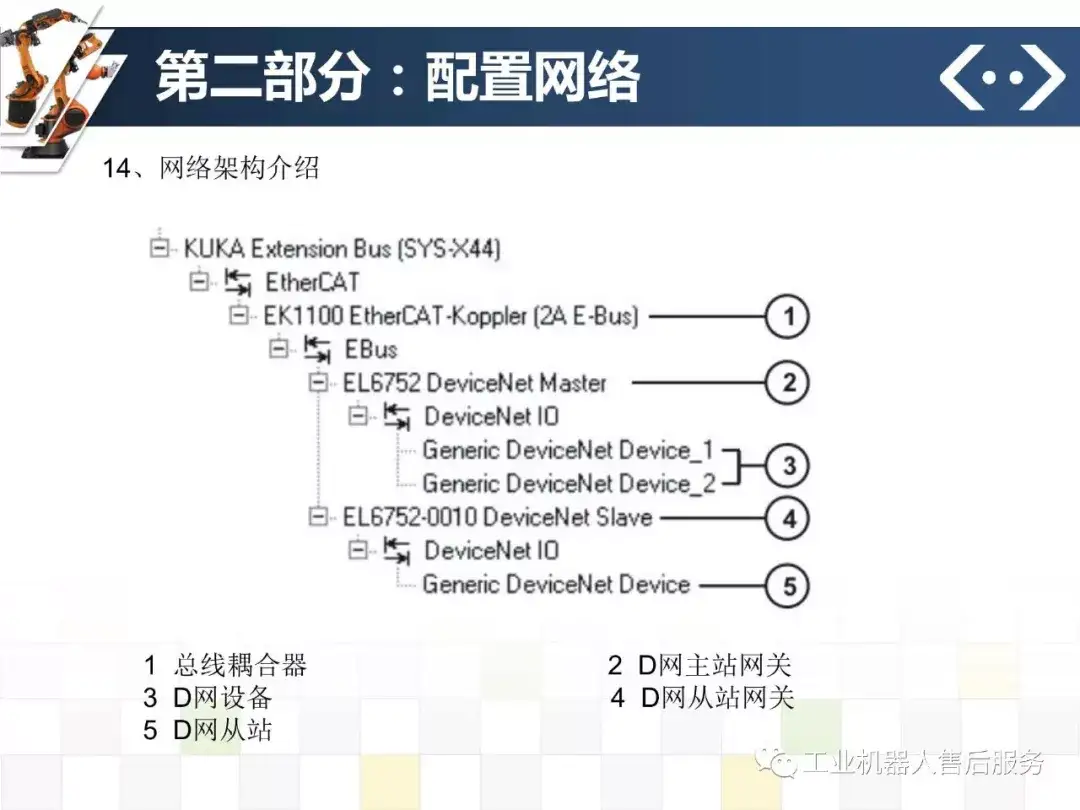
一:KUKA机器人总线配置
1.在文件夹:\archive\archive\C\KRC\Roboter\Init 中找到iosys.ini 文件 双击打开 进行通 信协议和IO配置。
2.首先进行通信协议配置,找到相应的文件名:如:使用DeviceNet协议通信,找到[DRIVERS]目录下找到 ;DEVNET=2,dnInit,dndrv.o去掉前面分号即可以。即DEVNET=2,dnInit,dndrv.o 通行协议配置完成。
3. 其次进行IO配置
如;使用DeviceNet协议通信找到[DEVNET]目录下配置输入、输出 . 输入信号
Inw0=1,0,x30 ;1 as MACID 把前面的分号去点就可以:即Inw0=1,0,x30 ;1 as MACID 输出信号Outw0=1,0,x10 把前面的分号去点就可以:即Outw0=1,0,x10,IO配置完成
KUKA机器人系统默认为主站4,保存,总线配置完成。
二:通信参数设置:
在文件夹:\archive\archive\C\KRC\Roboter\Init 找到denet文件,双击打开 如下: [krc]
debug=0 …………………………….. 此项有系统默认
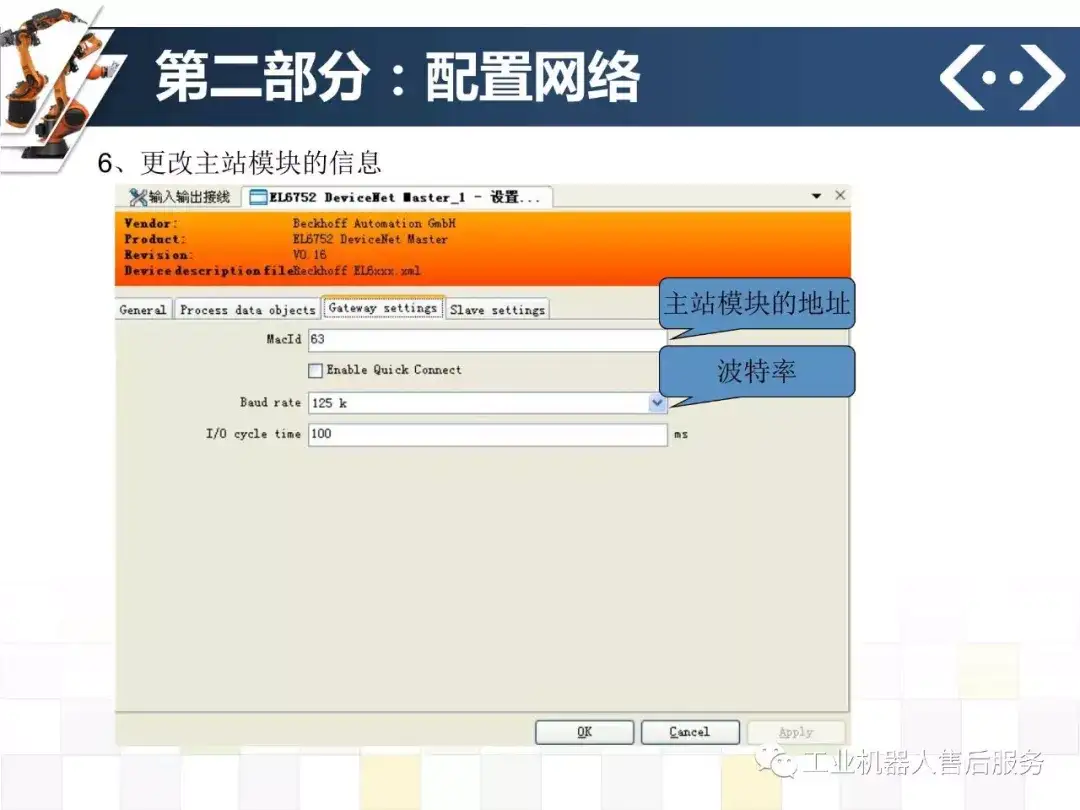
baudrate=500…………………………波特率分有3种分别 125,250,500 [1]
macid=1……………………………...1表示子站站号(选择和机器人通信的子站站号)保存